|
Abstracts |
Posters |
|
Titles |
Authors | |
|
|
Robot Factors: An Alternative Approach for Closing the Gap in Human versus Robot Manipulation |
Zhe Xu and Maya Cakmak | |||
|
|
It takes two hands to grasp Towards Handovers in Bimanual Manipulation Planning |
Ana Huaman Quispe, Heni Ben Amor and Mike Stilman | |||
| Poster | Computation of Realistic Contact Forces in Grasping. | Katharina Hertkorn, Maximo A. Roa, Thomas Wimbock and Christoph Borst | |||
| Poster | Effects of Compliance in Parallel to Actuators on Grasping and Manipulation in Robotic Hands | Prashant Rao, Taylor D. Niehues, Pei-Hsin Kuo, Rachel Smith and Ashish D. Deshpande | |||
| Poster | Fault Recovery in Logical Manipulation Policies | Neil Dantam, Heni Ben Amor, Henrik Christensen and Mike Stilman | |||
|
|
Elastic transmission mechanisms: multiport models for human-like compliant grasping in robotic hands |
Joshua A. Schultz, Michael J. Martell and Gavin O'Mahony | |||
| Poster | Learning Grasp Phases from Human Demonstrations | Oliver Kroemer, Gerhard Neumann, Herke van Hoof and Jan Peters | |||
| Poster | Tracking hand-object interaction: towards a database for human grasping and manipulation | Qiushi Fu and Marco Santello | |||
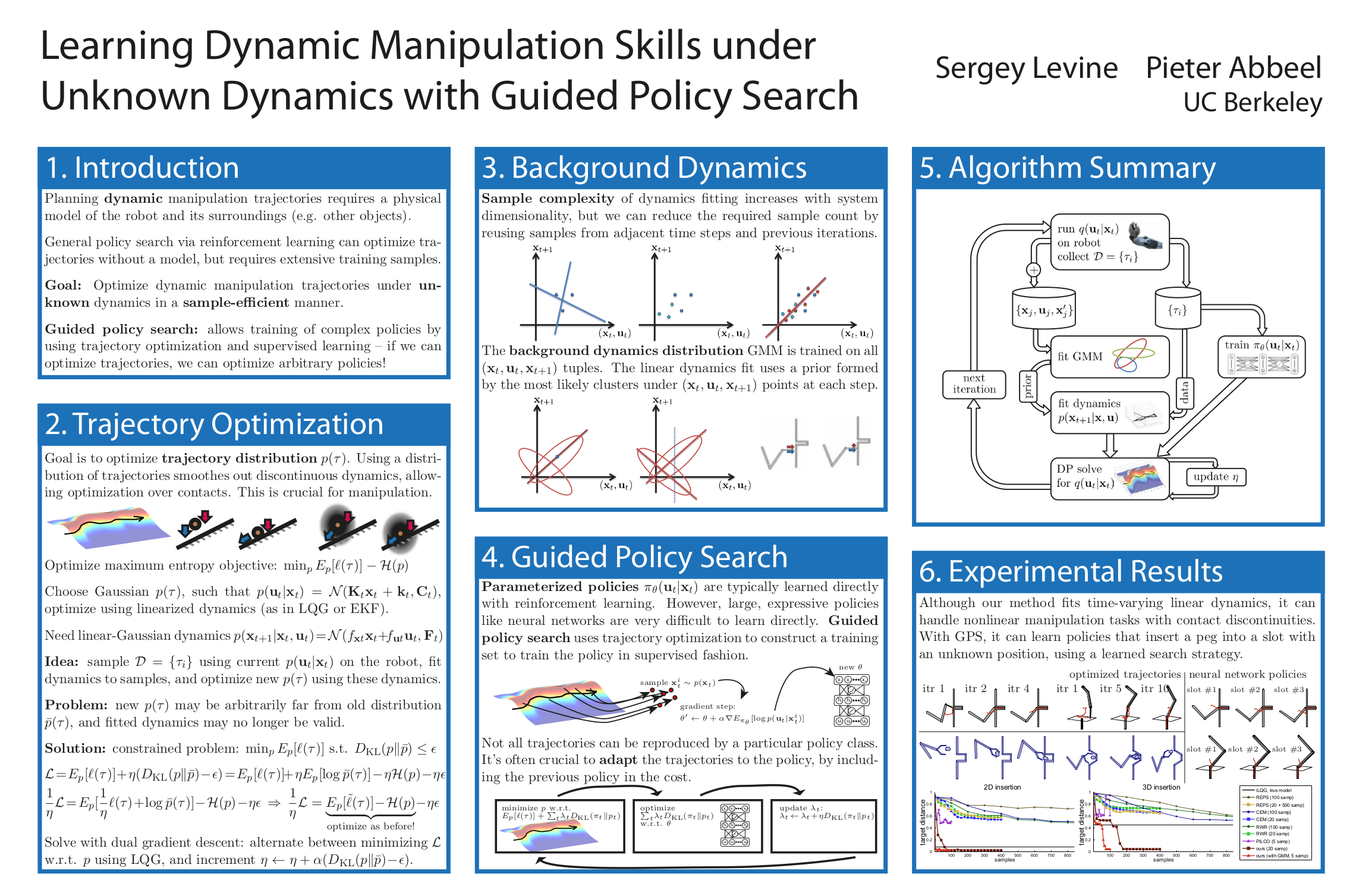
| Poster | Learning Dynamic Manipulation Skills under Unknown Dynamics with Guided Policy Search | Sergey Levine and Pieter Abbeel | |||
| Poster | Construction of a 3D Object Recognition and Manipulation Database from Grasp Demonstrations | David Kent and Sonia Chernova |
{kind=link}