|
Abstracts |
Posters |
|
Titles |
Authors | |
|
|
Robot Factors: An Alternative Approach for Closing the Gap in Human versus Robot Manipulation |
Zhe Xu and Maya Cakmak | |||
|
|
It takes two hands to grasp Towards Handovers in Bimanual Manipulation Planning |
Ana Huaman Quispe, Heni Ben Amor and Mike Stilman | |||
| Poster | Computation of Realistic Contact Forces in Grasping. | Katharina Hertkorn, Maximo A. Roa, Thomas Wimbock and Christoph Borst | |||
| Poster | Effects of Compliance in Parallel to Actuators on Grasping and Manipulation in Robotic Hands | Prashant Rao, Taylor D. Niehues, Pei-Hsin Kuo, Rachel Smith and Ashish D. Deshpande | |||
| Poster | Fault Recovery in Logical Manipulation Policies | Neil Dantam, Heni Ben Amor, Henrik Christensen and Mike Stilman | |||
|
|
Elastic transmission mechanisms: multiport models for human-like compliant grasping in robotic hands |
Joshua A. Schultz, Michael J. Martell and Gavin O'Mahony | |||
| Poster | Learning Grasp Phases from Human Demonstrations | Oliver Kroemer, Gerhard Neumann, Herke van Hoof and Jan Peters | |||
| Poster | Tracking hand-object interaction: towards a database for human grasping and manipulation | Qiushi Fu and Marco Santello | |||
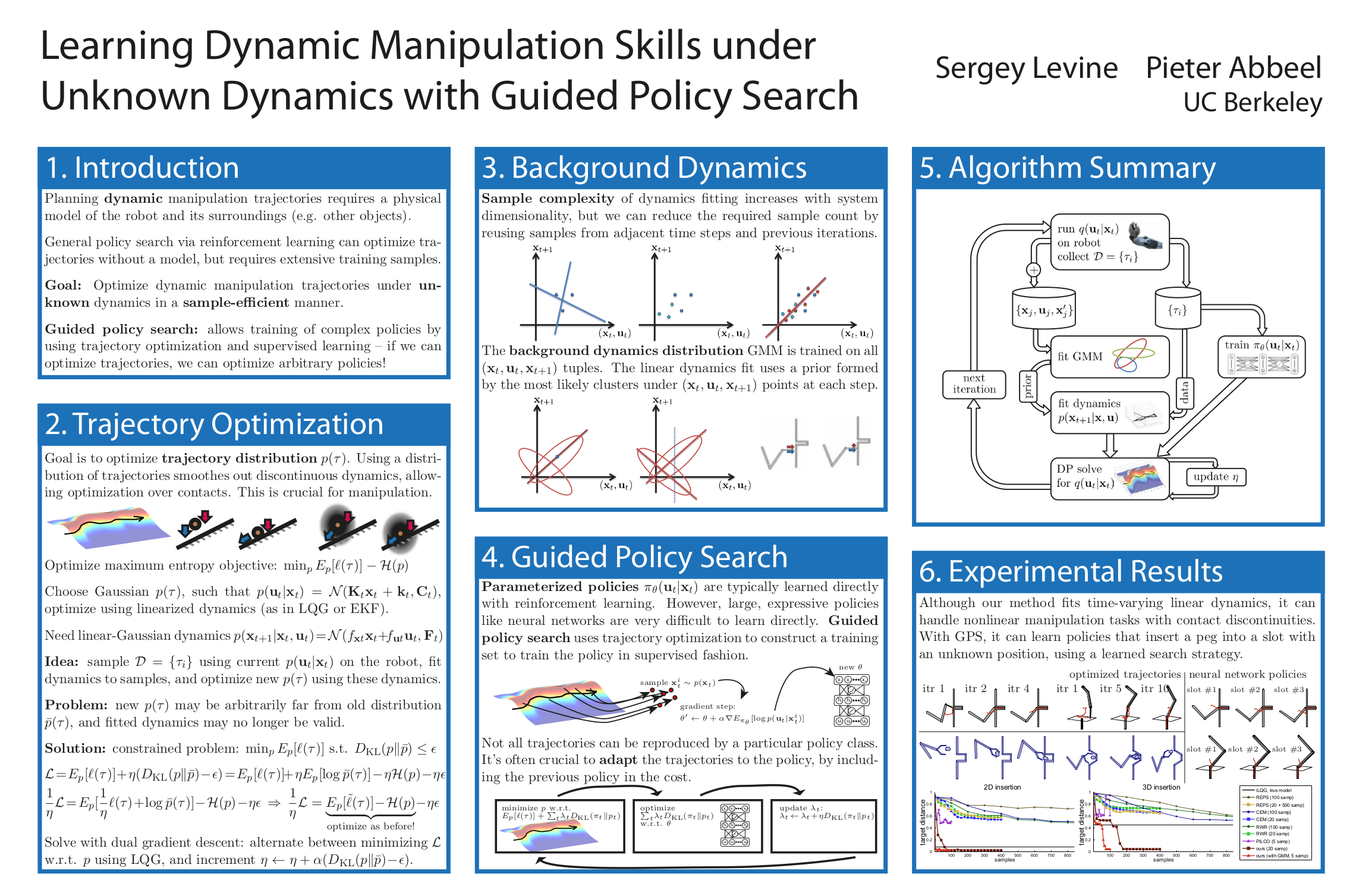
| Poster | Learning Dynamic Manipulation Skills under Unknown Dynamics with Guided Policy Search | Sergey Levine and Pieter Abbeel | |||
| Poster | Construction of a 3D Object Recognition and Manipulation Database from Grasp Demonstrations | David Kent and Sonia Chernova |
|
University of Southern Calforinia
Human Hands
|
Yale University
Robotic Hands
|
|
Arizona State University
Human Grasping
|
TU Berlin
Robotic Grasping
The original invited speaker was Antonio Bicchi. Unfortunately, due to a scheduling conflict, Antonio cannot attend RSS. Oliver will therefore present a talk he co-authored together with Antonio Bicchi. |
|
University of Southern California
Human Perception
Yes, the real Michael Arbib, no kidding! His research focuses on the coordination of percption and action. He has made seminal contributions to neural networks, discovered mirror neurons, did pioneering work on affordance that greatly influenced the use of this concept in robotics, just to name a few things. So, together with Marco Santello, we may have united in this workshop the two neuroscientists with the biggest impact on robotics. |
University of Innsbruck
Robotic Perception
|




{kind=link}
The workshop takes places on Saturyday, July 12, 2014 in room 210 Wheeler. It is structured around 3 pairs of invited presentations, each pair consisting of a human and a robot side. The topics for the three pairs will be a) hands, b) grasping, c) perception. Following each pair of invited talks, there will be a discussion session on the corresponding topic. After the presentation/discussion sessions, there will be a panel discussion. The workshop will close with a poster session under the theme “Novel Directions in Grasping and Manipulation”.
|
Topic |
Humans |
Robots |
|
Intro (15 mins) |
Organizers |
|
|
Hands (9:00-10:00) |
||
|
Discussion 1 (10:00-10:30) |
Towards the right hardware
|
|
|
Break (10:30-11:00) |
Coffee break |
|
|
Grasping (11:00-12:00) |
|
Oliver Brock |
|
Discussion 2 (12:00-12:30) |
Towards effective grasp planning |
|
|
Break (12:30-14:00) |
Lunch break |
|
|
Perception (14:00-15:00) |
|
|
|
Discussion 3 (15:00-15:30) |
Towards appropriate perception |
|
|
Break (15:30-16:00) |
Coffee break |
|
|
Panel Discussion (16:00-17:00) |
All invited speakers + one moderator from among the organizers |
|
|
Novel directions in grasping and manipulation (17:00-18:00) |
Poster session with contributed and invited posters |
|
|
Closure (15 mins) |
Organizers |
|
List of questions to be discussed:
-
What kind of knowledge representation do we need to efficiently capture the understanding of the world?
-
How can we exploit human knowledge in an efficient way as a teaching tool?
-
Are we currently exploiting all the capabilities of the robotic hardware that we have, or the limitations that we experience come more from the sensing/ planning/ control/ execution/ supervision side?
-
How much should we rely on sensorial vs a-priori information?
-
Is machine learning the new paradigm for robotic manipulation?
-
Do we really need grasp/manipulation.task planning, or we can create a more natural robot-environment interaction?
-
What type of benchmarking do we need to compare advances in robotic manipulation?
-
Oliver Brock, This email address is being protected from spambots. You need JavaScript enabled to view it., http://robotics.tu-berlin.de, Technische Universität Berlin
-
Dmitry Berenson, This email address is being protected from spambots. You need JavaScript enabled to view it., http://users.wpi.edu/~dberenson/, Worcester Polytechnic Institute
-
Jim Mainprice, This email address is being protected from spambots. You need JavaScript enabled to view it., https://sites.google.com/site/jimmainprice, Worcester Polytechnic Institute
-
Maximo A. Roa, This email address is being protected from spambots. You need JavaScript enabled to view it., http://www.robotic.dlr.de/Maximo.Roa, German Aerospace Center (DLR)
-
Clemens Eppner, This email address is being protected from spambots. You need JavaScript enabled to view it., http://robotics.tu-berlin.de, Technische Universität Berlin
- You are here:
-
Home

-
Accepted Posters
- Uncategorised